
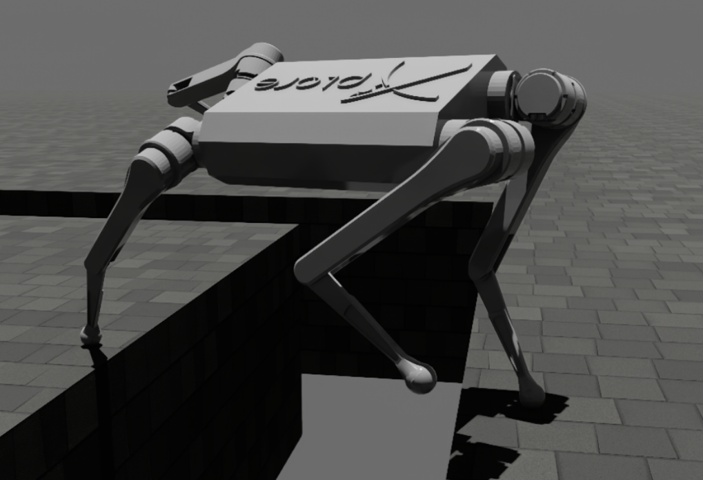
Reinforcement learning for agile quadrupedal locomotion over challenging terrains. Master's robotics semester project, conducted at EPFL Xplore.
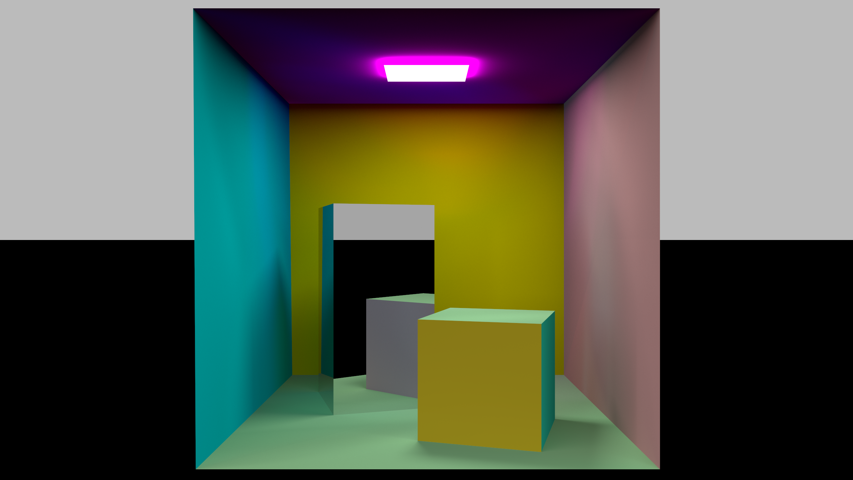
A path tracer running on the GPU, using the Vulkan ray tracing extensions. Developed out of personal intereset.
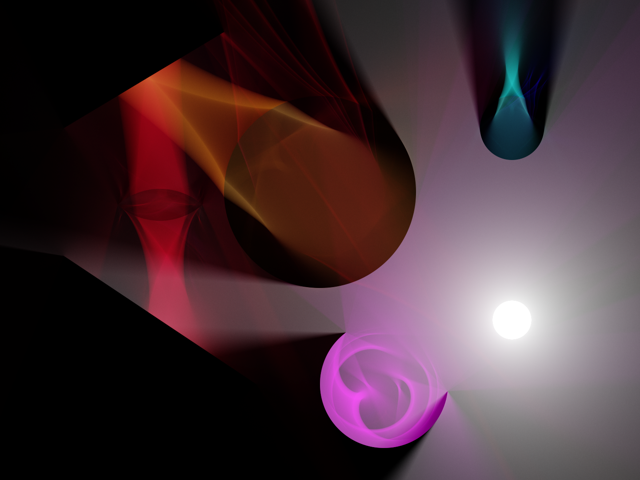
A 2D path tracer running on the GPU, using OpenGL. Developed out of personal intereset.
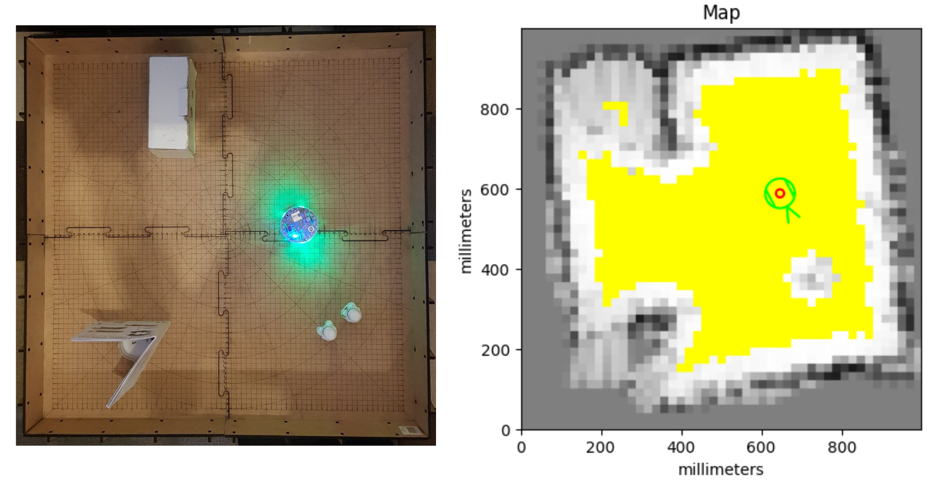
Project using the Thymio robot. Uses vision from an overhead camera, sensory feedback and state estimation for robust navigation in an unknown environment, with arbitrary target positions. Master's mobile robotics project.
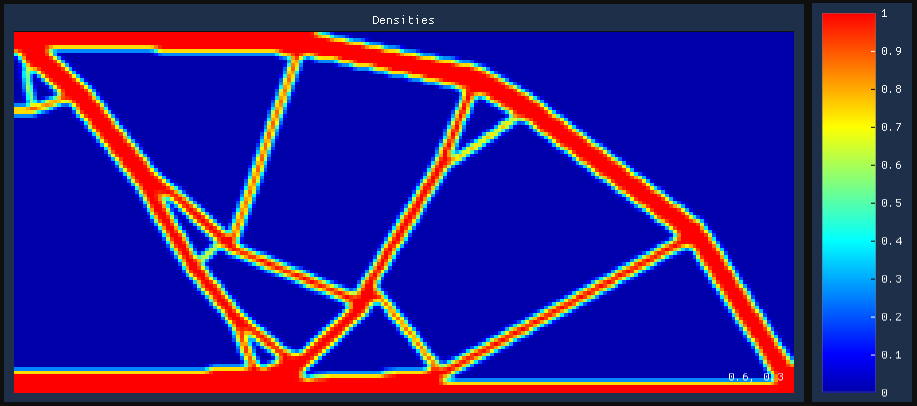
Exploring and understanding how topology optimization is implemented. Developed out of personal interest.
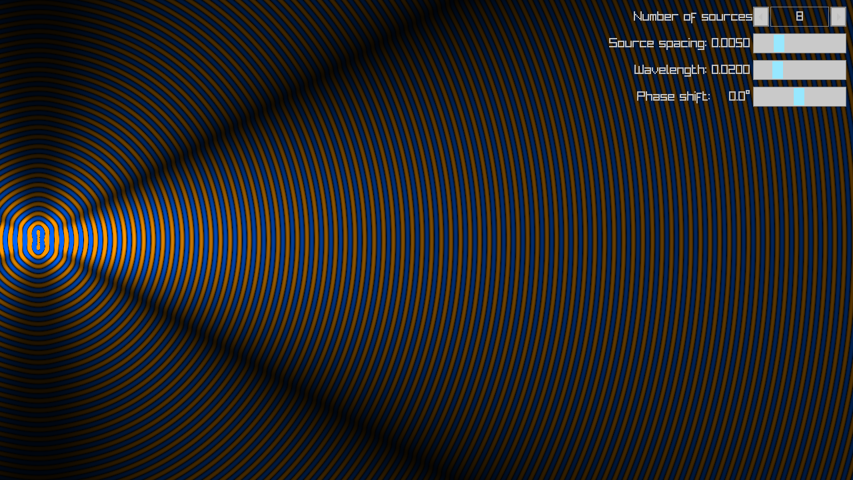
An interactive simulation of a phased array. Developed out of personal interest.
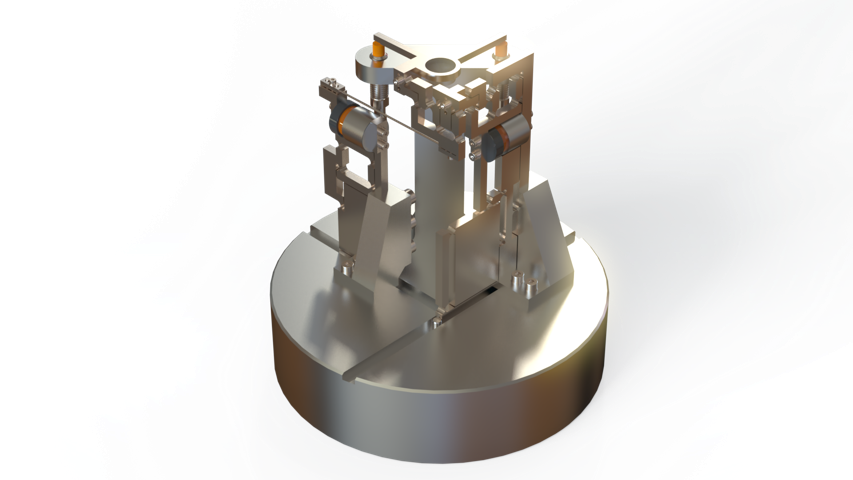
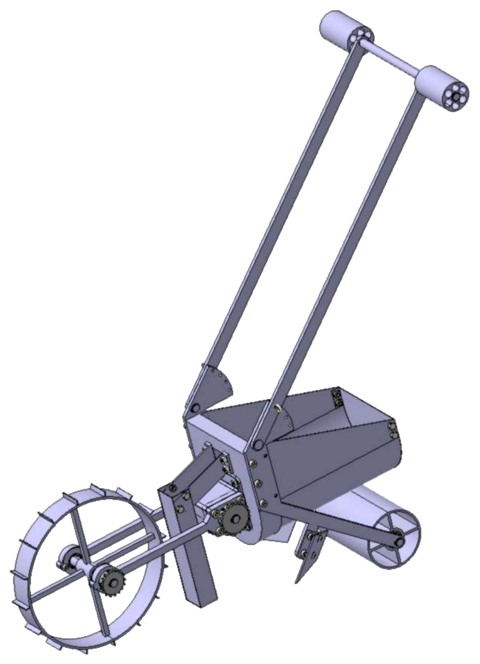
Seeder with configurable seed size and spacing. Bachelor's mechanical design project.